Anleitung
Benötigtes Material
*manche Links werden aufgrund der mangelnden Verfügbarkeit in kürze hinzugefügt
Die hinter den Links befindlichen Materialien wurden von uns verwendet. Sie können die gleichen, ähnliche oder nur eine Auswahl davon verwenden, da dies die breite Modularität ermöglicht.
Sollte beispielsweise der Kauf der Elektroden nicht möglich sein, so können Sie dennoch Proben sammeln und colorimetrische Tests durchführen, deren Ergebnis nachträglich in die Benutzeroberfläche für die Auswertung eingegeben werden kann.
** ggf. fehlende Dateien werden in kürze hochgeladen
Downloads
© 2024 Die Software sowie die 3D-Modelle sind lizenziert unter einer Creative Commons (4.0 International Lizenz) Attribution – NonComercial (Namensnennung – Nicht kommerziell)
Hardware
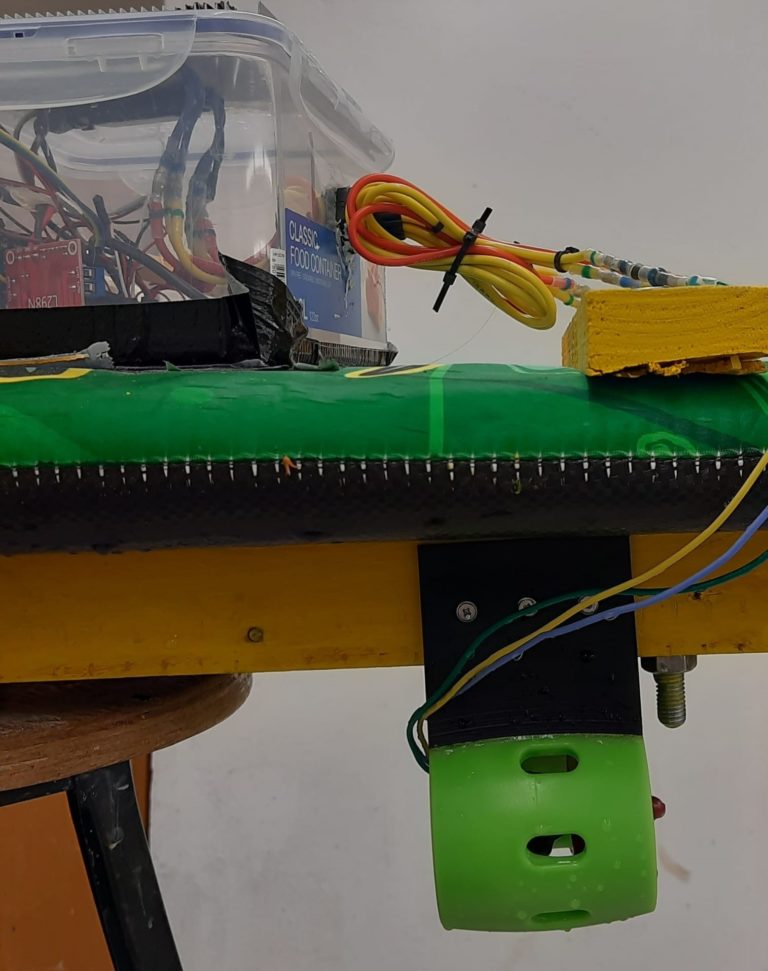
Schwimmplattform
Die Auftriebskraft stellt das zentrale Element der Messplattform dar, weshalb ein Kindersurfboard aus Styropor verwendet wurde. Aufgrund der Eigenschaften von Styropor ist jedoch keine Befestigung durch einfache Schrauben möglich, sodass ein Rahmen aus Holz oder einem ähnlichen Material durch einen Klemmmechanismus angebracht werden muss. Im Falle von Holz ist eine Lackierung vor dem Eintauchen in Wasser erforderlich.
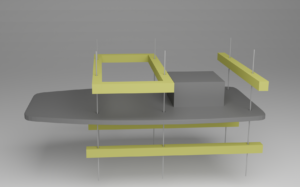
Im nächsten Schritt müssen die Aussparungen für die Probenbehälter möglichst mittig geschnitten werden, um den Schwerpunkt in der Mitte zu halten. Um das Gewicht der Proben weiter zu verteilen, empfiehlt es sich, ein dünnes Brett auf der Oberseite des Surfbretts anzubringen, das die Halterungen der Probenbehälter stützt. Dafür sollte es mit dem Rahmen verbunden sein.

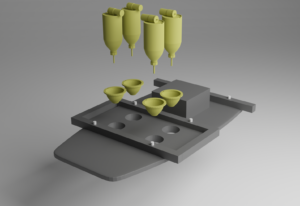
Probenbehälter
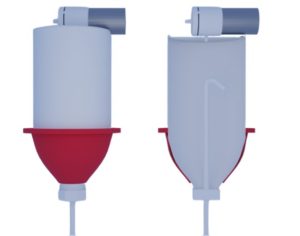
Um Wasserproben sammeln zu können werden Spritzflaschen verwendet, wie man sie aus dem Unterricht kennt. Dabei werden die Halme umgedreht, sodass sich der Knick innerhalb der Flache befindet (er bleibt bestehen, damit die Pumpe kein Wasser ansaugt). Als Nächstes wird ein kleines Loch in den Boden der Spritzflasche gestochen und mit dem Ansaugprofil der Pumpe verbunden. Verwendet werden Pumpen aus dem Aquatikhandel.
Zur Sammlung von Wasserproben werden Spritzflaschen verwendet, wie sie beispielsweise aus dem Chemieunterricht bekannt sind. Dabei werden die Halme umgedreht, sodass sich der Knick innerhalb der Flasche befindet (um zu verhindern, dass die Pumpe Wasser ansaugt). Im nächsten Schritt wird ein kleines Loch in den Boden der Spritzflasche gestochen und mit dem Ansaugprofil der Pumpe verbunden. Diese Pumpen werden standardmäßig im Aquatikhandel verwendet.
Um zu gewährleisten, dass die Probenbehälter sicher sitzen und dennoch leicht entnommen werden können, werden ihre Halterungen mittels 3D-Druck hergestellt, in den vorgesehenen Löchern der Plattform verklebt und die Flaschen hineingesteckt.
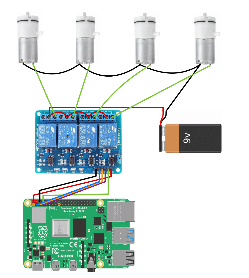
Die Steuerung der Pumpen erfolgt über einen Switch, der mit einem 9-Volt-Block in der Hauptbox verbunden ist. Die Auslösung des Switches erfolgt durch den Raspberry Pi über einen festen Zeitraum, wodurch die entsprechende Pumpe betätigt wird und somit das Zielvolumen im Behälter erreicht wird.
Sensorhalterung
Aufgrund der Vielzahl verfügbarer Sensoren auf dem Markt ist oftmals eine individuelle Anpassung erforderlich. Um den Tausch sowie das Befestigen zu erleichtern, wird ein Schienensystem verwendet, welches mit Kabelbindern am Rahmen angebracht wird. Die Anzahl sowie die Positionierung sind dabei frei wählbar. Sofern die Verwendung identischer Sensoren vorgesehen ist, können die entsprechenden Halterungen direkt heruntergeladen und übernommen werden.


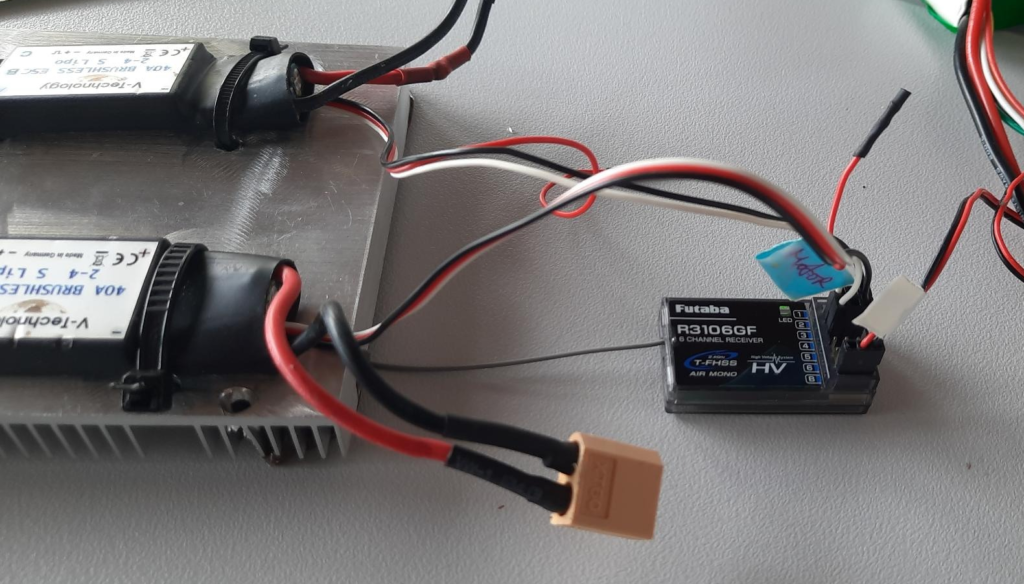
Stromversorgung
Zur Stromversorgung des Antriebs werden zwei Akkus des Herstellers Einhell mit einer Spannung von 18 V und einer Kapazität von 4 Ah verwendet. Aufgrund ihrer hohen Sicherheit, Stabilität und Verfügbarkeit werden sie gegenüber Lithium-Polymer-Akkus (Li-Po) bevorzugt. Um das Koplungssystem nutzen zu können, wird die entsprechende Halterung gedruckt und mit Kabeln versehen, an deren Ende Flachsteckhülsen befestigt sind. An ihrem anderen Ende werden sie, ideal mittels Steckern, an die ESC’s angebunden.
Die Stromabnehmer werden an der Außenseite der Hauptbox angebracht.
Antrieb
Nachdem die Flächen der Motorhalterungen mit einem geeigneten Kleber beschichtet wurden, erfolgt die Verschraubung mit den Motoren. Die Halterungen werden mittels Gewindeschrauben an den Streben auf der Unterseite des Bootes angebracht.
Ein Test, ob die Motoren in die korrekte Richtung antreiben ist hilfreich. Gegebenenfalls muss die Verbindung der Kabel ihrer Stromversorgung und Steuerung zu den ESC’s oder sogar der Ausrichtung der Motoren geändert werden.

Steuerung
Die Steuerung der Plattform erfolgt im manuellen Zustand mittels einer Fernsteuerung, wie sie beispielsweise im Modellflugsport zum Einsatz kommt. Die T6L Sport eignet sich somit aufgrund der hohen Reichweite besonders gut für die Steuerung. Der Empfänger befindet sich in der Hauptbox und wird durch eine Powerbank an Kanal „B“ versorgt. (Ggf. muss das Powerkabel mit einem USB-Stecker verlötet werden.) Die Verbindungen mit den ESC’s belegen die Kanäle 2 und 3 am Empfänger, die durch die vertikale Bewegung der Joysticks aktiviert werden.
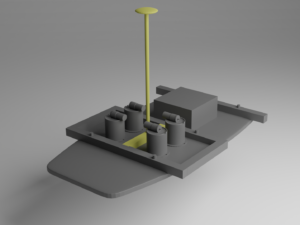
GPS
Die Zuordnung und Überprüfung der Daten erfordert die Kenntnis der Position der Plattform, welche durch ein GPS-System bestimmt wird. Die Verwendung einer GPS-Mouse, welche an einer senkrechten, etwa 50 cm langen Stange oder Rohr befestigt wird, gewährleistet eine störungsfreie Signalübertragung. Das GPS wird an den Pixhawk in der Hauptbox angeschlossen.
Sensorik
Software